伪随机算法系列-04 Perlin Noise(Gradient Noise)
翻译—-Pseudorandom Noise-Perlin Noise
如果你觉得这篇教程不错,请去支持原作者
此教程使用的Unity版本为2020.3.6f1
- 制作一个泛型化的晶格(lattice)噪声
- 添加对梯度噪声的支持
- 生成1D,2D,3D的柏林噪音
这是伪随机噪音系列教程的第四篇.通过增强值噪音的功能来支持柏林噪声.
1 泛型梯度噪声(Generic Gradient Noise)
值噪声是一种在晶格点上定义了恒定值的晶格噪声.通过对这些点进行插值从而产生的一个平滑的图案,但是晶格的样子还是非常明显.另一种方法是在函数之间插值,而不是在常量之间插值.这意味着每个晶格点都有自己的函数.为了保持简单和一致,所有的点都要使用同一个函数计算,只是参数不同而已.最简单的函数是常量值,也就是ValueNoise.再往上一步,就是一个线性依赖于采样点坐标并相对于晶格点的函数.最直接的是$f(x)=x$,x为相对坐标.这将产生以格点为中心的线性坡道或梯度.因此,这种类型的噪声被称为梯度(Gradient)噪声.
因为值噪声是梯度噪声的其中一小种.所以我们可以调整一下晶格噪声的代码使它始终生成梯度噪声.
1.1 梯度类接口(Gradient Interface)
首先为Noise添加一个局部类,命名为Noise.Gradient,在其中定义一个IGradient接口.
1 | using Unity.Mathematics; |
梯度算法的目的是对一个hash值和一个相对坐标进行评估.在接口中定义一个向量化的Evaluate,现在只用于1D噪声,除了传入hash值之外,它还需要X坐标作为参数.
1 | public interface IGradient |
我们像以前做1D值噪声那样添加一个Value结构体,现在只需要它返回hash.Floats01A的值.
1 | public struct Value : IGradient |
为了增加对2D和3D噪声的支持,添加另外两个接口.
1 | public interface IGradient |
Value也必须实现这些方法,依然是简单地返回hash.Floats01A而忽略坐标参数.未使用的参数不会影响性能,因为Burst会优化掉它.
1 | public struct Value : IGradient |
1.2 梯度输入(Gradient Input)
为了向梯度函数提供相对坐标,我们向Noise.Lattice中的LatticeSpan4添加一个向量化的参数g.
1 | struct LatticeSpan4 |
在GetLatticeSpan4函数中,通过使用当前坐标减去p0来得到相对坐标.
1 | span.p0 = (int4)points; |
现在我们可以修改一下Lattice1D.GetNoise4里的代码,通过调用Evaluate函数来代替直接计算hash值的函数,将需要的hash值和相对坐标点作为参数传入.
1 | public struct Lattice1D : INoise |
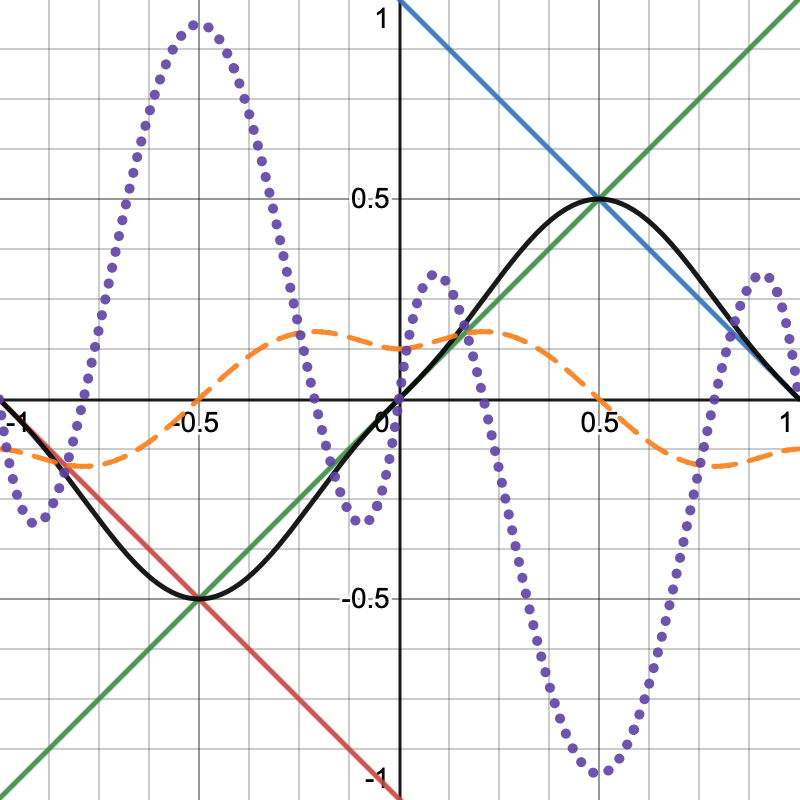
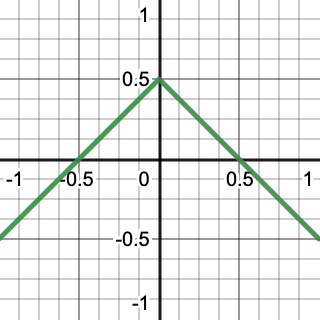
目前我们看到的效果任然和1D值噪声一样,并且连生成的编译后的代码都是一样的.为了理解梯度噪声是如何工作的,我们可以暂时改变一下参数值.把Evaluate函数的代码改成最简单的梯度函数$f(x)=x$.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x) => x; |
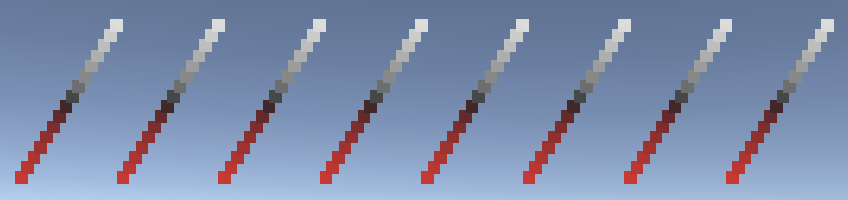
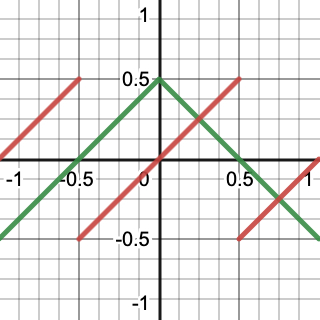
由此产生的是[-1,1]之间的一串线性梯度斜坡效果.因为我们在基于p0点的每个跨度的左右两半(图上表示为红色和白色部分)都使用了相同的算法,所以这些梯度并没有连在一起.为了做出真正的梯度噪声,右半边第二个梯度的算法必须基于坐标点p1.修改一下LatticeSpan4里的代码,将单个的g参数改为g0和g1.
1 | struct LatticeSpan4 |
因为第二个晶格点所在的位置正好比第一个点远1个单位,所以修改GetLatticeSpan4的代码,使用g0-1来计算g1.
1 | span.p0 = (int4)points; |
修改下Lattice1D.GetNoise4的代码,使用修改后的相对坐标点,p0和g0为一组,p1和g1为一组.
1 | return lerp(g.Evaluate(hash.Eat(x.p0), x.g0), g.Evaluate(hash.Eat(x.p1), x.g1), x.t) * 2f - 1f; |

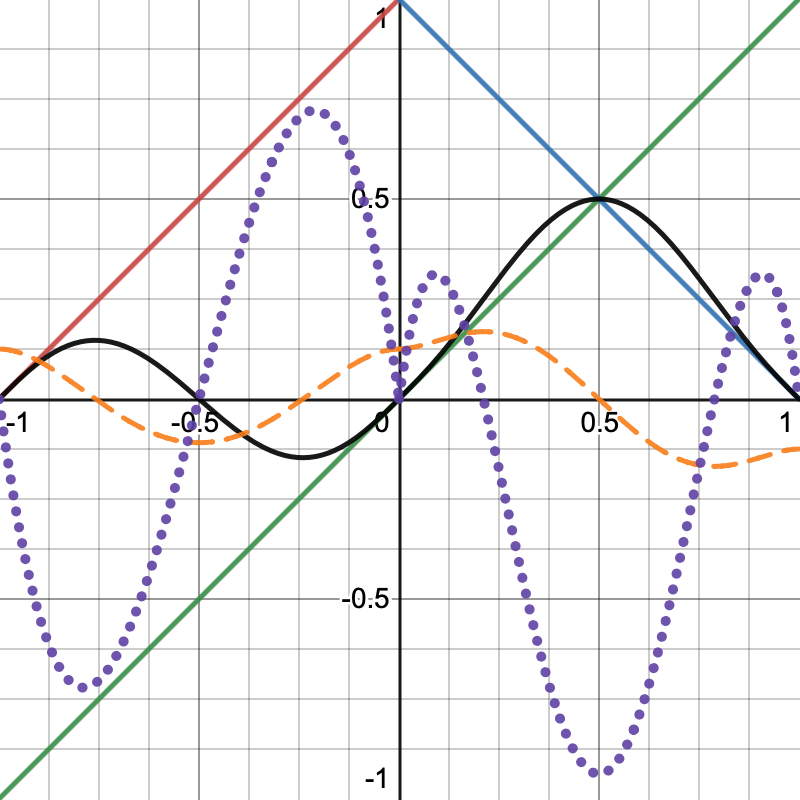
如果我们使用线性插值,得到的效果就是平的,因为梯度会相互抵消.不过我们使用了平滑的C2-连续插值,每个梯度都是由它附近的(左右两边)晶格点的计算而来,因此就能得到一个波浪效果.
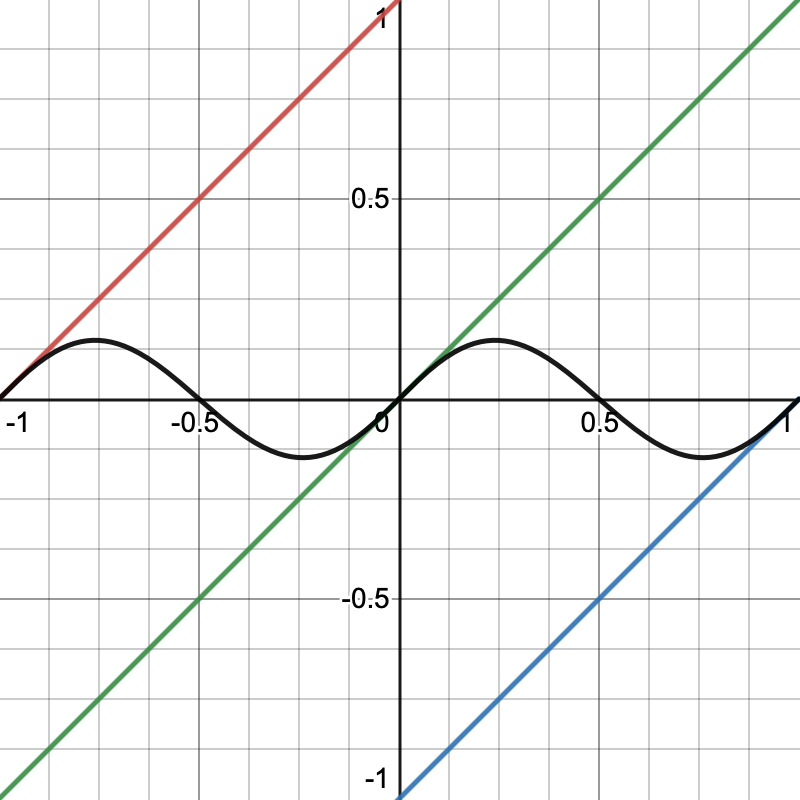
请注意这个梯度效果在晶格点的位置上(-1,0,1)是0,在跨度的中间(0.5)这个插值点的位置也是0,因为梯度值在这几个点的位置上相互抵消了.
现在我们得到的效果是反向的,因为前面我们修改了一下范围.这个修改是当时专门针对值噪音的,所以我们把他改回来,将以前的内容转移到值函数上去.
1 | public struct Value : IGradient |
删除掉Lattice.GetNoise1D后的转换.
1 | return lerp(g.Evaluate(hash.Eat(x.p0), x.g0), g.Evaluate(hash.Eat(x.p1), x.g1), x.t); |
梯度插值函数还是C2连续的吗? 因为梯度函数在晶格点的位置上是斜的,所以一阶导数在此点不再是0,但它在跨度上仍然是连续的,因为两边梯度的波形是重复的.二阶导数在晶格点位置上任然是0,所以是连续的.
1.3 泛型晶格类(Generic Lattice)
现在有了一个梯度值噪声,我们接着做一个Lattice1D的泛型版本,就像Noise.Job那样.
1 | public struct Lattice1D<G> : INoise where G : struct, IGradient |
用同样的方法修改下Lattice2D,使用IGradient.Evaluate函数来替换以前的,传入的晶格点的相对坐标不要写错了.
1 | public struct Lattice2D<G> : INoise where G: struct, IGradient |
Lattice3D函数也一样.
1 | public struct Lattice3D<G> : INoise where G : struct, IGradient |
现在必须在NoiseVisualization中显示地使用Value作为泛型参数.
1 | static ScheduleDelegate[] noiseJobs = |
与以前一样,我们现在可以轻松的添加其他类型的梯度噪声了.
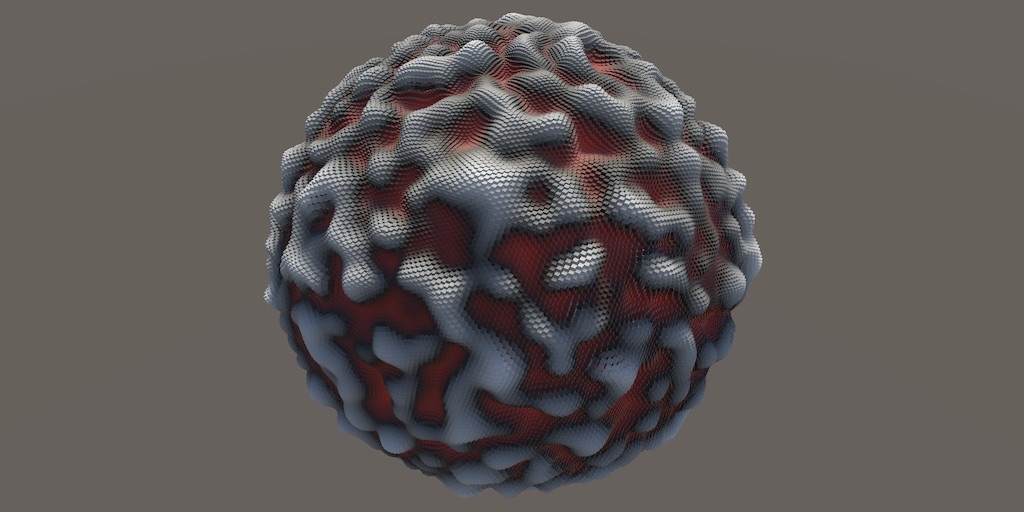
2 柏林噪声(Perlin Noise)
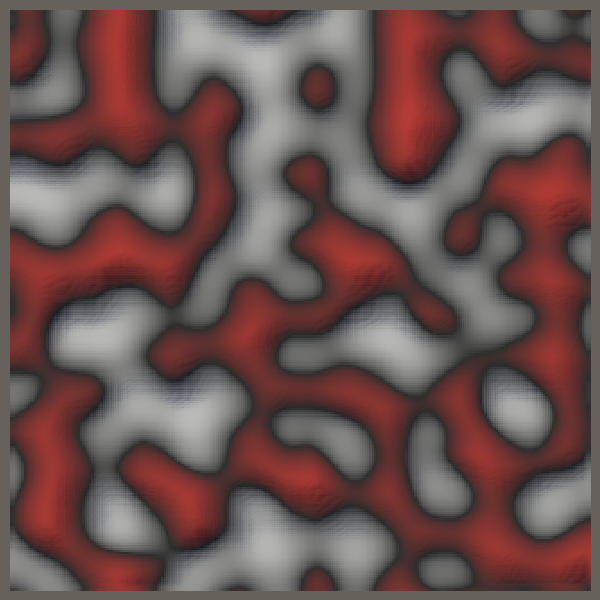
Ken Perlin制作了这种噪声的第一个版本,因此这个经典的噪声被称为**柏林(Perlin)**噪声.与我们目前已经知道的梯度噪声相比,柏林噪声增加了梯度向量可以有不同方向的设计.对这些不同方向的梯度进行插值,可以生成比值噪声更多的变化和更少的块状效果.
柏林噪声不是基于查表计算的吗? 可以,但是查表只是计算方法的其中一种.它能在性能平平的硬件上获得不错的效率,但是域的整体范围会很小,而且不能设定种子.并且这样就不能使用向量化的数组,利用SIMD指令优化计算了.所以我们需要用SmallXXHash4来代替.
2.1 Second Gradient Noise Type
为了实现Perlin噪声,照着写Value那样,在Noise.Gradient中添加一个继承于IGradient的Perlin结构体,先让所有Evaluate返回0.
1 | public struct Perlin : IGradient |
然后把NoiseVisualization类中的job组数变成2维的.2维数组的元素索引有两部分,所以声明的写法要从ScheduleDelegate[]变成ScheduleDelegate[,].然后将现有的代码写在第二组大括号中,并在值噪声之前加入一组新的柏林噪声的Job参数集合.
1 | static ScheduleDelegate[,] noiseJobs = |
我们添加一个枚举变量来随意切换柏林噪声和值噪声,修改UpdateVisualization的代码,并把这个参数作为组数的第一个参数.
1 | public enum NoiseType { Perlin, Value } |

2.2 1D梯度(1D Gradients)
Ken Perlin从没做过一个真正的1D噪声,因为这个基本没用.但是我们做了,因为这对理解更高维度的算法有帮助.我们已经用固定梯度函数$f(x)=x$测试过了1D梯度噪声.柏林噪声认为晶格点的梯度可以是不同的,在1D维度下,另一个不同的最简单的梯度函数,就是上面那个函数的负数版本,即$f(x)=-x$.我们可以使用hash值的第一个bit位来确定要选择正或负的版本.
使用可变梯度时噪声依然是连续的吗? 是的,二阶导数在晶格点的位置始终是0,一阶导数始终是连续的,因为在两端晶格点的梯度是一样的.
1 | public struct Perlin : IGradient |
这导致晶格点之间的跨度有四种插值组合:正-正,负-负,正-负,负-正.由于正和负是镜像的,所以实际只有两种独特的情况:斜率变化相同和不同.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x) => 2f * select(-x, x, ((uint4)hash & 1) == 0); |
2.3 可变型梯度算法(Variable Gradients)
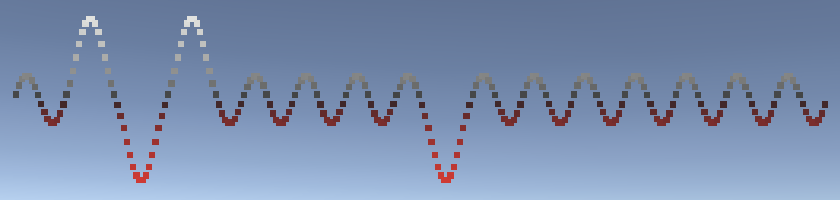
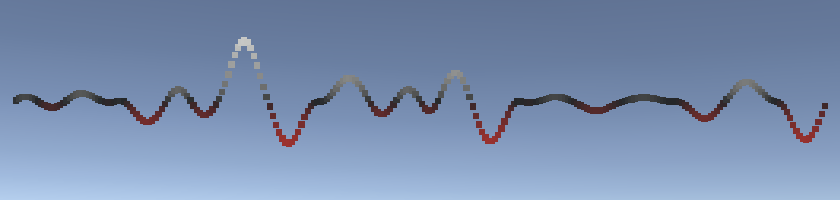
我把上面做出来的那种噪声命名为二分(binary)柏林噪声,因为它的梯度只能有两种状态.噪声由一连串指向同一方向的梯度序列组成,只是会有上下波动.整个序列看起来有小部分大振幅的波形,而其余的是小振幅波型.不过这看起来非常僵硬,让我们试试不同的方法.
与其二分选择,不如用一个转换到[-1,1]之间的hash值作为因子来缩放相对坐标.不过仍需要翻倍计算结果使最大振幅为1.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x) => 2f * (hash.Floats01A * 2f - 1f) * x; |
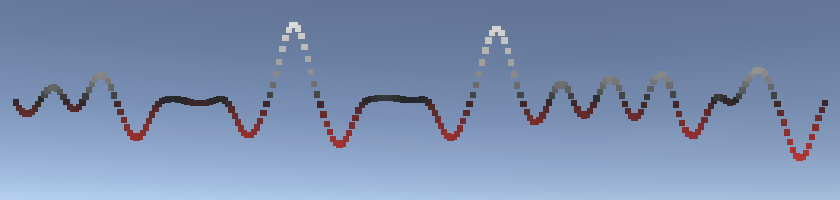
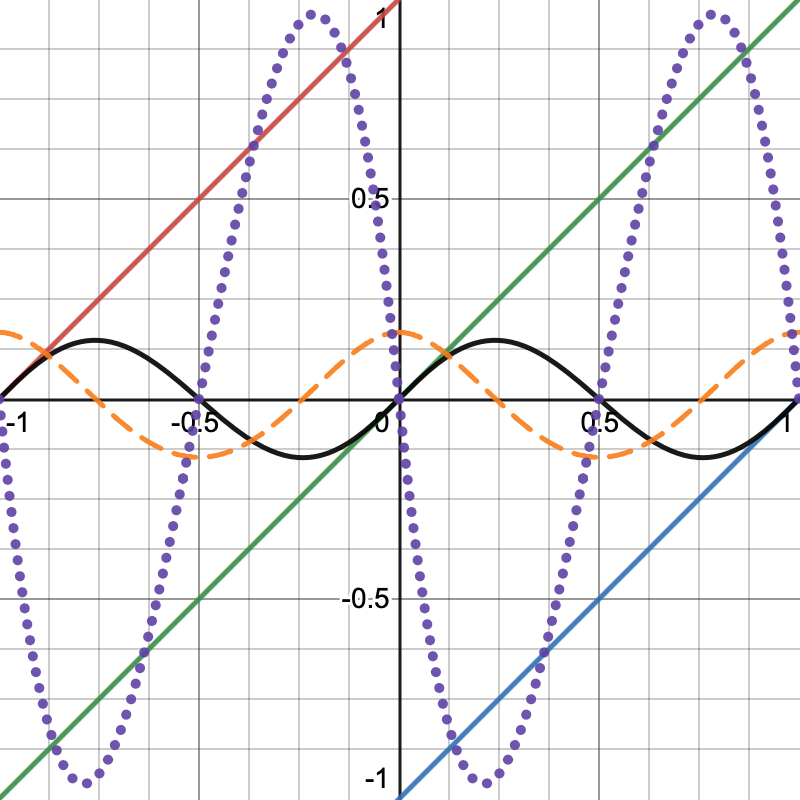
这效果看上去就更加有趣了,我们得到了一个有更多不同振幅的梯度效果.当然这让达到最大振幅的可能性降低了,因为序列的平均振幅降低了.
我们还可以组合可变和二分两个算法,使用hash第1个bit位来选择正负,并乘以Floats01A作为系数.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x) => 2f * hash.Floats01A * select(-x, x, ((uint4)hash & 1) == 0); |
不过这样写会让第1bit位被使用两次,为了避免这种情况,我们使用第9bit位来确定正负.
1 | 2f * hash.Floats01A * select(-x, x, ((uint4)hash & 1 << 8) == 0); |
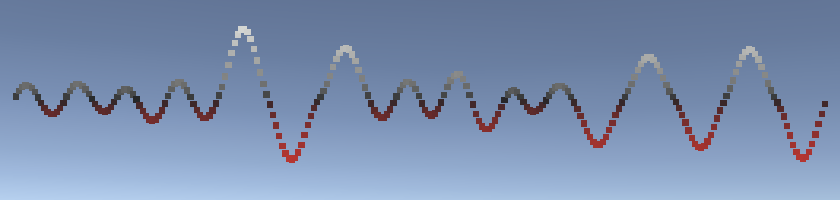
这种方法的好处是,无论梯度的方向如何,都有最小振幅,可以防止出现简化的(degenerate areas)区域,在这种区域里面,多个连续的晶格点之间的变化率几乎为0,于是就会出现一段非常平坦的区域.
最简单的方法就是把最小振幅设置为1,然后在这个基础之上加上hash的浮点值,得到的结果可以被当成是混合了二分和可变的两种方法,既保留了最小的振幅,也出现了很多的变化.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x) => (1f + hash.Floats01A) * select(-x, x, ((uint4)hash & 1 << 8) == 0); |
2.4 2D梯度(2D Gradients)
接下来是2D的噪声,我们还是从单个维度的二分梯度算法开始,使用第1bit位计算,看看效果如何.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x, float4 y) => select(-x, x, ((uint4)hash & 1) == 0); |
结果是带状的1D二分插值图案的平面集合.让我们再一次使用floatA这个方法来重新计算,使梯度更加多样化.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x, float4 y) => (hash.Floats01A * 2f - 1f) * x; |
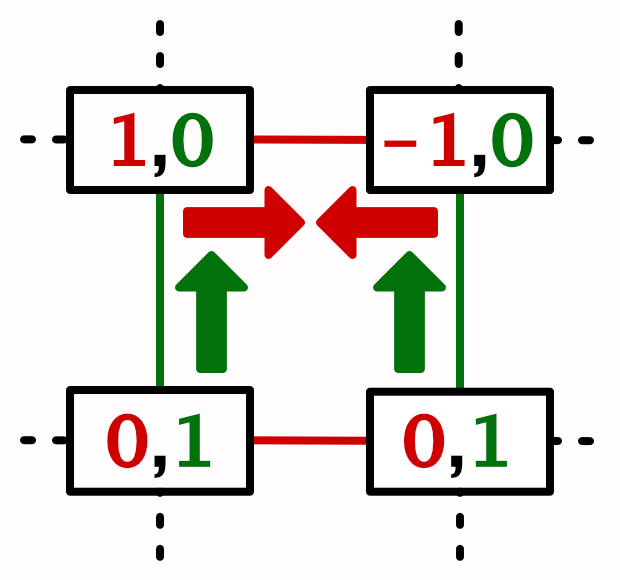
在2D噪声的中,我们不再被限制于轴对称的梯度,梯度向量可以旋转360度.为了生成这样一个向量,可以使用一种类似于生成八面体球体的方法,但需要减少到二维.
我们从X轴上的一条[-1,1]之间的直线开始,然后令Y等于0.5减去X的绝对值,就像我们在创建八面体的前半部分定义Z轴一样,只是现在少了一个维度.于是就形成了一个楔形,相当于是一个开了口的正方形.然后用X减去floor(X+0.5)来处理正方形的负值部分,使其闭合.
 |
 |
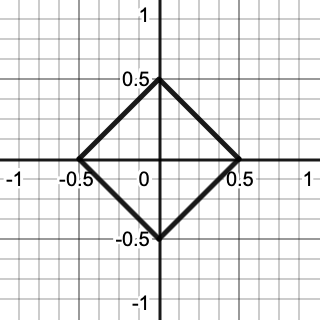 |
|---|
The process of creating a square from a line.
结果就形成了一个四个角挂在X和Y轴上的正方形,每个角都距离原点0.5个单位.梯度向量就从原点指向正方形的边上的某点.
为了计算二维的梯度,我们将其X和Y分量相加.最后翻倍这个值使轴对称向量的长度等于1.
1 | public float4 Evaluate(SmallXXHash4 hash, float4 x, float4 y) |
如果我们想把正方形的分布变成一个圆形分布,可以通过除以它们的长度来对梯度向量进行标准化.但是需要注意的是,这样做并不会产生均匀的圆形梯度分布,因为它们是沿着正方形均匀分布的,所以更集中于正方形的四个角附近,就像正八面体球体更集中在6个角上一样.不过这并没有什么问题,因为分布是对称的,而且有足够多的变化.
1 | return (gx * x + gy * y) * rsqrt(gx * gx + gy * gy); |
然而这对于最终效果来说,并不会产生很大的不同,所以我们可以省略掉这一部分,还能让代码跑的更快.标准化确实对对角型梯度更有利,但是噪声本身也需要标准化,我们后续可以解决这个问题.
1 | return (gx * x + gy * y) * 2f; |
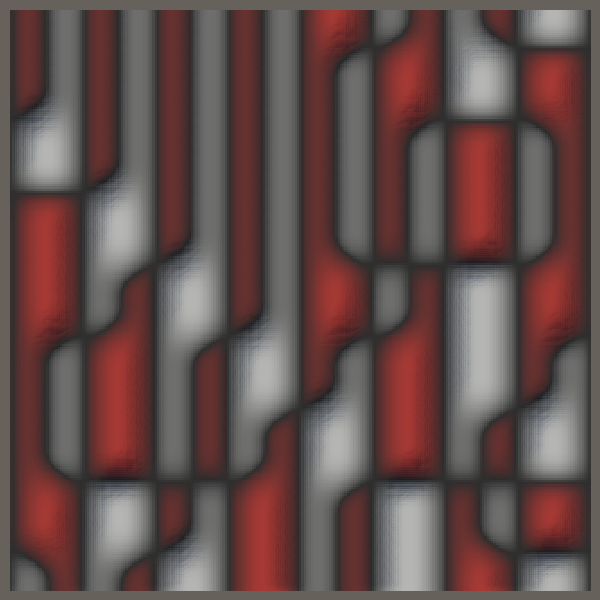
2.5 标准化2D噪声(Normalized 2D Noise)
为了标准化噪声,我们需要找到最大的振幅.如果一个晶格方形有4个都指向中心的梯度,那么最大值将处在中心点的位置.因为这点是四个相等梯度的平均值,所以我们只需要计算位于此点的单个梯度的值.一个完美的对角型梯度函数是$f(x,y)=\frac{x+y}{2}$,所以中心点的振幅就是$f(0.5,0.5)=\frac{1}{2}$.不过这并不是最大的振幅,因为还有一种配置的梯度算法可以得到更大的振幅.
当两个梯度都在同一个轴上相互直指向对方,此时将处于晶格跨度正中间,这就是单个维度上的最大值0.5.这是没有被标准化的1D二分柏林噪声.如果晶格方形的另一边的两个梯度直指它们对面的这两个晶格点,那么在两个维度上进行插值计算之后,在某点上可以算出来一个超过0.5的值.
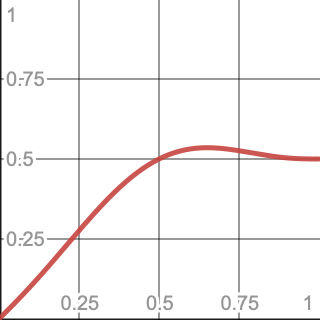
因为最大值是由一维中点沿着第二个维度上进行插的某点,所以这本质就是一个在轴对称梯度和0.5之间进行平滑差值的函数.因此我们必须找到当$s(t)=6t^5−15t^4+10t^3$时,函数$xs(1−x)+0.5s(x)$在范围[0,1]之间的最大值.
把这个函数展开得到$6x(1-x)^5-15x(1−x)^4+10x(1−x)^3+3x^5−7.5x^4+5x^3$.
然后可以简化成$−6x^6+18x^5−17.5x^4+5x^3+x$.
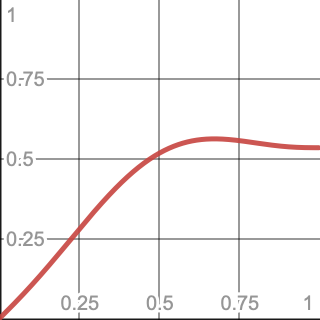
为了找到最大值,我们必须对函数求导来寻找0这组解,因为当变化率为0时,原函数此时就达到最大值或最小值.这个值可以被算出来,但只靠硬算很难.所以为了知道函数长成什么样,我们可以使用Desmos将其可视化.通过选择这条函数曲线上的某一点,我们可以立即得知,当X坐标位于0.6509处时,最大值为0.5353,它的确大于0.5.
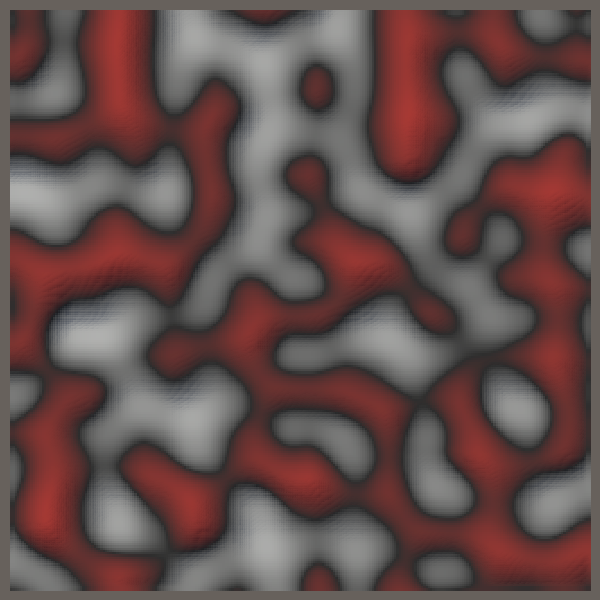
我们问问专业的Wolfram|Alpha,让它告诉我们一个更精确的最大值.专业网站给了我们一个超级精确的答案,但它太变态了,所以我们用近似值0.53528来代替就行了.比起Desmos来说,这个答案精确到了后一位.于是,将梯度除以这个值,就能得到归一化的2D柏林噪声.
1 | return (gx * x + gy * y) * (2f / 0.53528f); |
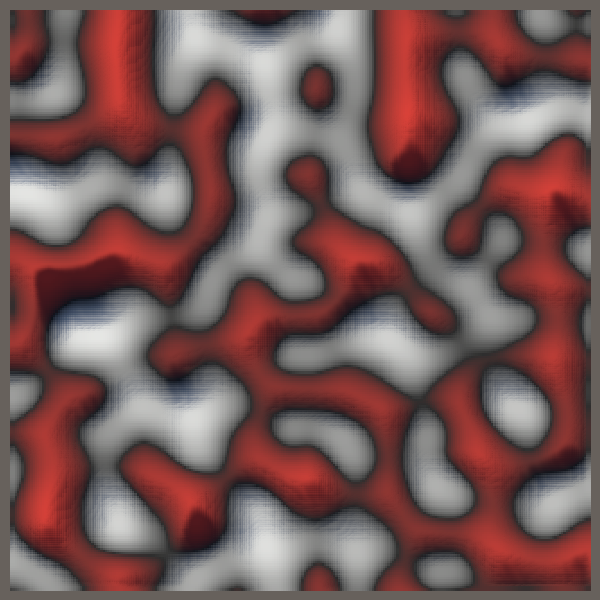
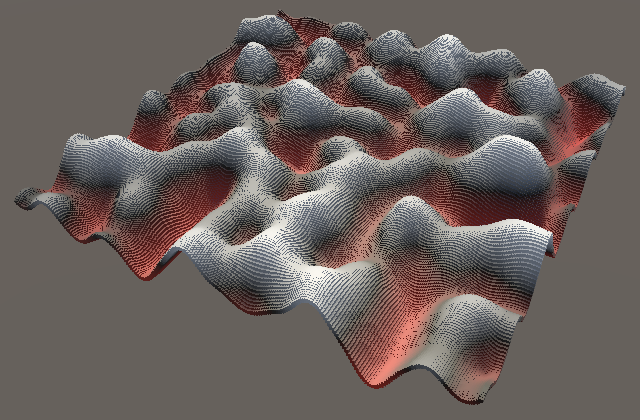
Normalized 2D Perlin noise.
圆形梯度的最大振幅是多少? 完美对角型梯度的圆形版本的函数是$f(x,y)=\frac{x+y}{\sqrt{2}}$.所以最大振幅,是在所有梯度都指向晶格块中心时,这个函数为$f(0.5,0.5)=\frac{1}{\sqrt{2}}\approx0.7071$.因此为了标准化噪声,我们必须除以这个数,或者乘以$\sqrt{2}\approx1.4142$.
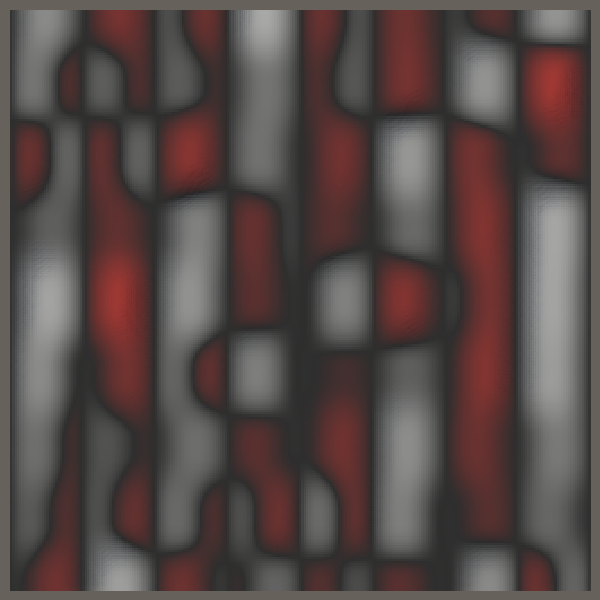
2.6 3D梯度(3D Gradients)
为了创建3D柏林噪声,我们得像做2D噪声那样,不过要扩大一维.这里同样可以使用生成八面体的方法.在这种情况下,我们就需要两个在[−1,1]范围内的随机值.我们将使用Floats01A和Floats01D.D算法快于B或C算法,因为单比特的移位操作,比移位操作加模操作要快.
1 | public float4 Evaluate (SmallXXHash4 hash, float4 x, float4 y, float4 z) |
3D柏林噪声不是只需要使用12个梯度向量吗? 柏林噪声的参考实现的确是这样的,从一组12个不同方向的2D对角梯度向量,指向立方体边缘中心,然后经过一些重复,最终会得到16个选项.于是,四个比特的值就可以转换为梯度.虽然这种方法对于普通编码方式或专用硬件来说是挺不错的,但嵌套型的二分函数代码并不能利用SIMD指令加速.我们这种基于八面体的方法既快(如果我们不对梯度进行归一化计算),又能提供更多的花样.
就跟找2D最大振幅一样,把梯度沿着第三个维度进行插值,此梯度沿着当前维度的轴向指向对面2D晶格平面,直到移动到最大值0.53528处.接下来像处理2D晶格方形的函数那样,要最大化函数的值,用0.53528替换0.5:$xs(1−x)+0.53528s(x)$,此函数可以展开成$6x(1−x)^5−15x(1−x)^4+10x(1−x)^3+0.53528(6x^5−15x^4+10x^3)$,输入Desmos后可以得到X在0.6732时最大,结果等于0.5629.
Wolfram|Alpha说在0.67321时的值是0.56290.
1 | return (gx * x + gy * y + gz * z) * (1f / 0.56290f); |
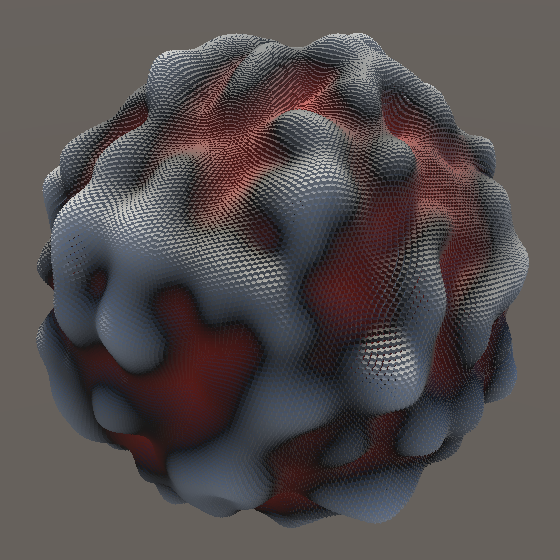
3D球体梯度的最大振幅是多少? 为了用球体梯度向量代替八面体,梯度向量要直指晶格体的中心,即函数$f(x,y,z)=\frac{x+y+z}{\sqrt{3}}$.所以最大振幅值可以在晶格体的中心位置找到,即$f(0.5,0.5,0.5)=\frac{1.5}{\sqrt{3}}\approx0.8660$.除以这个值就可以标准化噪声了.
伪随机算法系列-04 Perlin Noise(Gradient Noise)
https://tzkt623.github.io/2022/01/14/Pseudorandom Noise-04 Perlin Noise/
